中文
网站首页
公司介绍
产品介绍
案例展示
研发生产
友商入住
新闻资讯
招商招聘
联系我们
1.人形机器人工业应用:创新性将人形机器人技术应用于工业生产场景,实现复杂环境下的智能化作业;
2.机器替代人工解决方案:专注于工业自动化升级,通过智能装备实现生产流程的无人化改造;
3.SMT整线设备及配套服务:提供从整线设备到配件、耗材、辅料的一站式解决方案。
机器人
通用人形
行业应用
健身
服务与支持
关于宇树
APP下载
移动平台无痛适配
应用场景呈多元化
紧凑、轻量
灵巧、灵活
足够的负载
足够的精度
支持关节力控
具有撞击保护
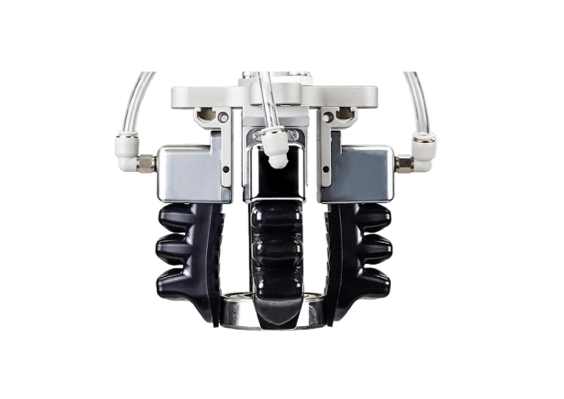
开放性的程序接口和拓展接口
陆续开源机械臂控制程序及控制接口,机械臂末端可快速换装不同执行器
应用场景
各种移动机器人机载机械臂、电商物流、新消费、日常生活等。
功能
参数
背隙
~6弧分
通讯方式
高速485
最大扭矩
33N·m
编码器分辨率
15bit
重量
405g
力控精度
~0.2N·m
尺寸
Φ65*52mm
控制频率
1KHz
减速器
谐波减速器
轴承
工业级交叉滚子
减速比
60+
电机感知反馈
力矩、角度、角速度
电压
推荐24V
电机控制指令
力矩、角度、角速度,刚度、阻尼
等四足及其他移动机器人,
协同完成复杂任务,探索各种应用场景。
技术参数
型号
Z1 AIR
Z1 PRO
自由度
6轴
自重
4.3kg
4.5kg
负载
2kg
≥3kg
最大臂展
740mm
重复定位精度
~0.1mm
电源需求
电压24V 电流>20A
接口
Ethernet
用户控制系统
Ubuntu
功率
峰值500w
力反馈和碰撞检测
有
控制接口
位置+力控
关节
运动范围
最大速度
关节参数
J1
±150°
180°/s
J2
0-180°
J3
-165°-0
J4
±80°
J5
±85°
J6
±160°
[1]
以实际按使用需求测试而定,(机械臂测试标准差异很大,不同测试情况下精度差异巨大)。
[2]
由于每个关节采用的减速比较低,故整机位置控制刚度较低,如果采用的控制方式不够优化,机械臂运动时会有较大的位置控制误差及晃动。
[3]
本产品为民用机器人产品,请各位用户不要危险性改造和使用机器人。
[4]
请访问宇树科技官网了解更多产品相关条款与政策,请遵守各地区法律法规。
返回列表
咨询电话
在线留言
返回顶部