手机站


超越常人的灵活性
超大关节运动角度空间,23~43个关节电机
模仿&强化学习驱动
在AI加速下的机器人技术,每天都在升级进化
力控灵巧手,操作万物
结合力位混合控制,灵敏可靠,可以模拟人手实现对物体的精准操作

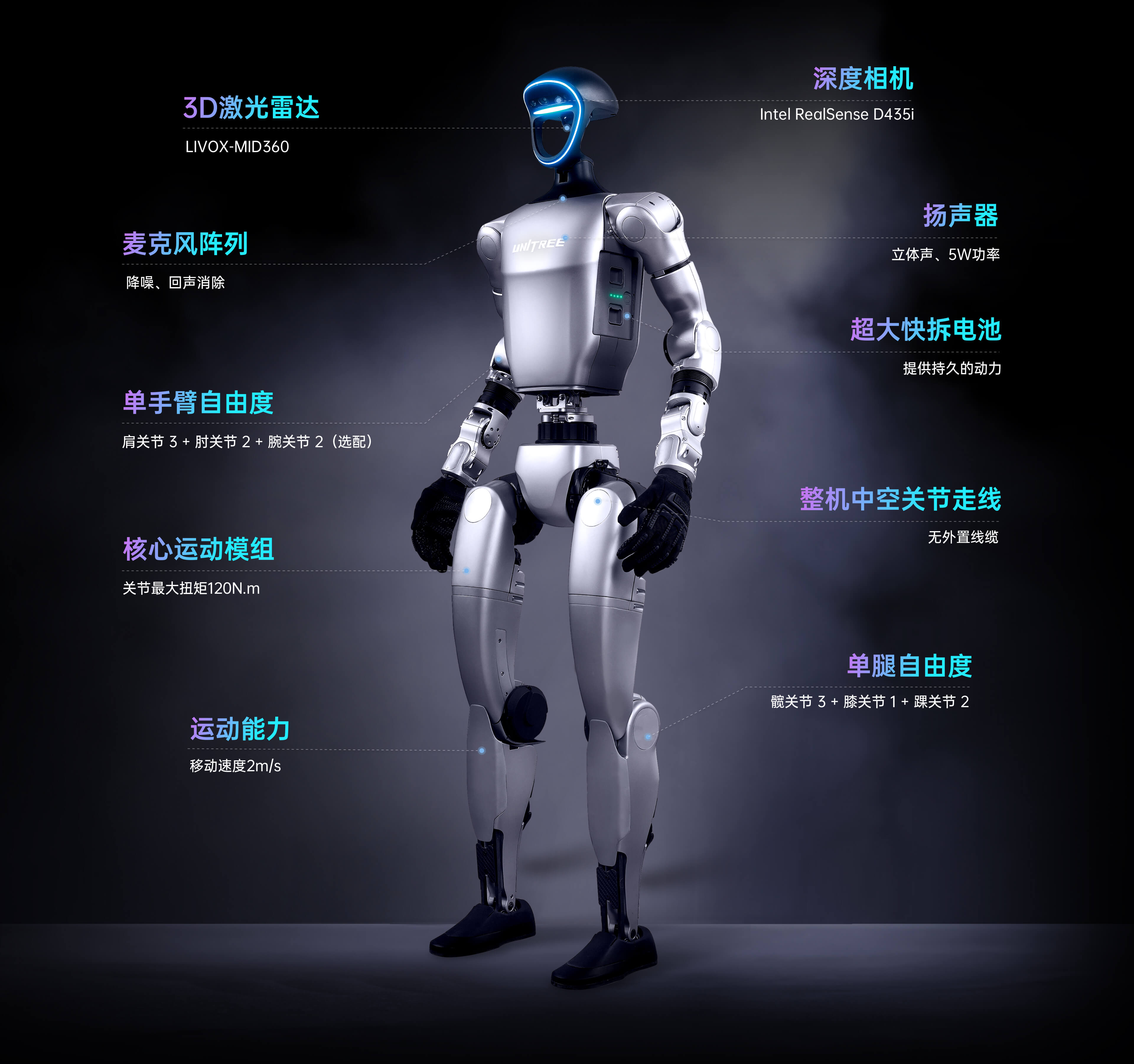
Unitree G1 产品参数
| 型号 | G1 | G1 EDU |
| 高宽厚(站立) | 1320x450x200mm | 1320x450x200mm |
| 高宽厚(折叠) | 690x450x300mm | 690x450x300mm |
| 带电池重量 | 约35kg | 约35kg+ |
| 总自由度(关节电机) | 23 | 23 - 43 |
| 单腿自由度 | 6 | 6 |
| 腰部自由度 | 1 | 1+(可加选2个腰部自由度) |
| 单手臂自由度 | 5 | 5 |
| 单手自由度 | / | 7(可加选力控3指灵巧手Dex3-1)+ 2(可加选2个手腕自由度) *3指灵巧手Dex3-1参数:大拇指3个主动自由度;食指2个主动自由度;中指2个主动自由度 **Dex3-1可加选安装多点触觉阵列 |
| 关节输出轴承 | 工业级交叉滚子轴承(高精度,高承载力) | 工业级交叉滚子轴承(高精度,高承载力) |
| 关节电机 | 低惯量高速内转子永磁同步电机(更好的响应速度和散热) | 低惯量高速内转子永磁同步电机(更好的响应速度和散热) |
| 膝关节最大扭矩【1】 | 90N.m | 120N.m |
| 手臂最大负载【2】 | 约2Kg | 约3Kg |
| 小腿+大腿长度 | 0.6M | 0.6M |
| 手臂臂展 | 约0.45M | 约0.45M |
| 超大关节运动空间 | 腰关节:Z±155° 膝关节:0~165° 髋关节:P±154°、R-30~+170°、Y±158° | 腰关节:Z±155°、X±45°、Y±30° 膝关节:0~165° 髋关节:P±154°、R-30~+170°、Y±158° 腕关节:P±92.5°、Y±92.5° |
| 全关节中空内走线 | 有 | 有 |
| 关节编码器 | 双编码器 | 双编码器 |
| 散热系统 | 局部风冷散热 | 局部风冷散热 |
| 供电方式 | 13串锂电池 | 13串锂电池 |
| 基础算力 | 8核高性能CPU | 8核高性能CPU |
| 感知传感器 | 深度相机+3D激光雷达 | 深度相机+3D激光雷达 |
| 4麦克风阵列 | 有 | 有 |
| 5w扬声器 | 有 | 有 |
| WiFi6、蓝牙5.2 | 有 | 有 |
| 高算力模组 | / | NVIDIA Jetson Orin |
| 智能电池(快拆) | 9000mAh | 9000mAh |
| 充电器 | 54V 5A | 54V 5A |
| 手持式遥控器 | 有 | 有 |
| 续航时间 | 约2h | 约2h |
| 智能OTA升级 | 有 | 有 |
| 二次开发【3】 | / | 有 |
| 保修期【4】 | 8个月 | 18个月 |
|
上一条:通用人形机器人Unitree H1 / H1-2
下一条:通用人形机器人Unitree G1-Comp |
返回列表 |